|
Sigmund Hennum Høeg I'm a Ph.D. graduate at the Robotics and Automation Group at NTNU, where I focus on applying learning methods to robotic control. I did my master's degree at the Norwegian University of Science and Technology (NTNU), where I did an academic exchange to ETH Zürich. |

|
ResearchI've done projects in Reinforcement Learning for robotic grasping, applying Language Models for decision making. I'm currently interested in Imitiation Learning for robotic control. |
|
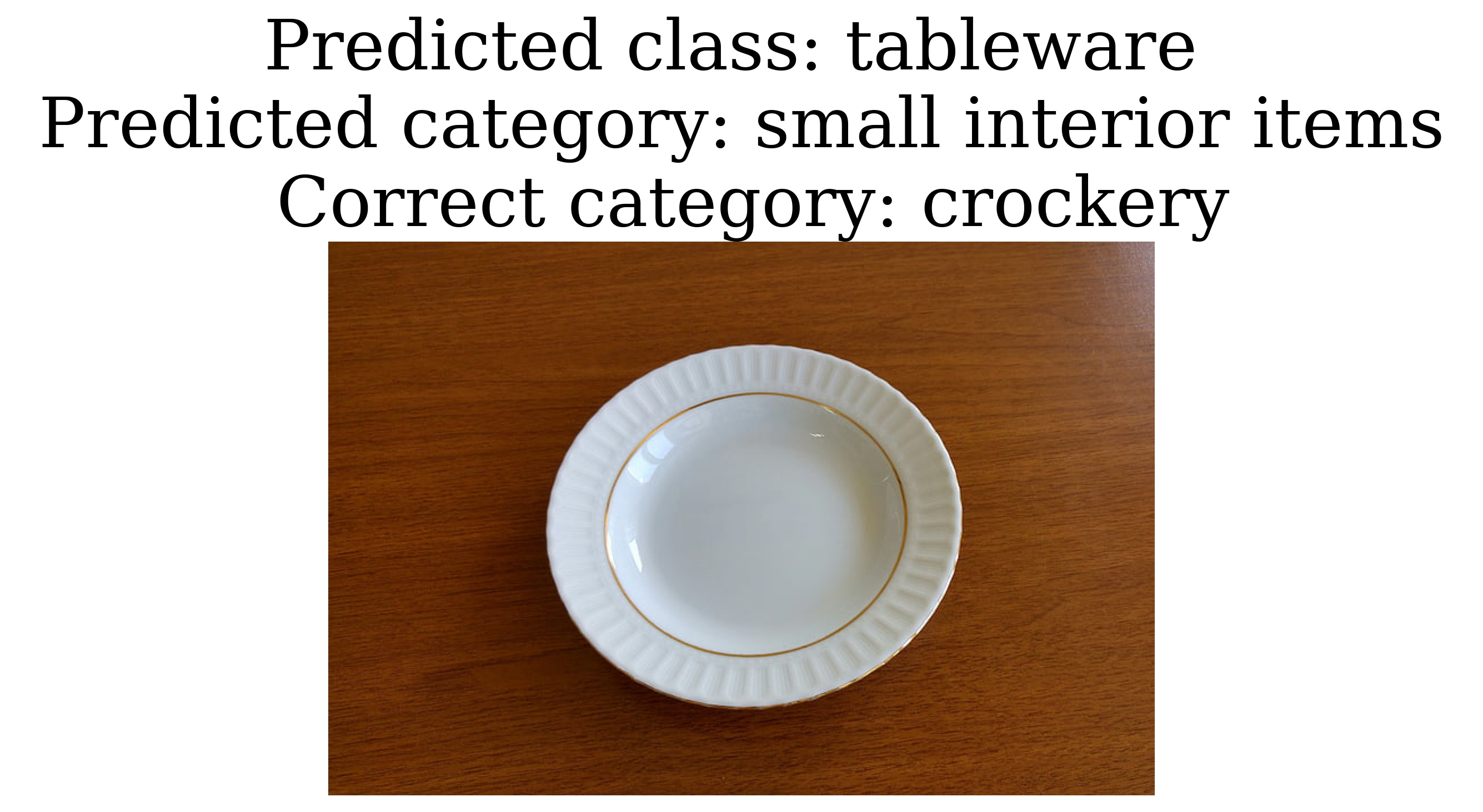
More than eleven thousand words: Towards using language models for robotic sorting of unseen objects into arbitrary categories
Sigmund Hennum Høeg, Lars Tingelstad Workshop on language and robotics at CoRL 2022, 2022 Analyzing the performance of language models on sorting unseen objects into arbitrary categories. Measuring performance metrics, and discussing failure modes. |

|
Learning to grasp: A study of learning-based methods for robotic grasping
Sigmund Hennum Høeg NTNU Open, 2022 A study of Reinforcement Learning methods for robotic grasping. We compare the performance of different methods, and discuss the challenges of applying RL algorithms to robotic grasping. Using Robosuite as a simulated benchmark. |